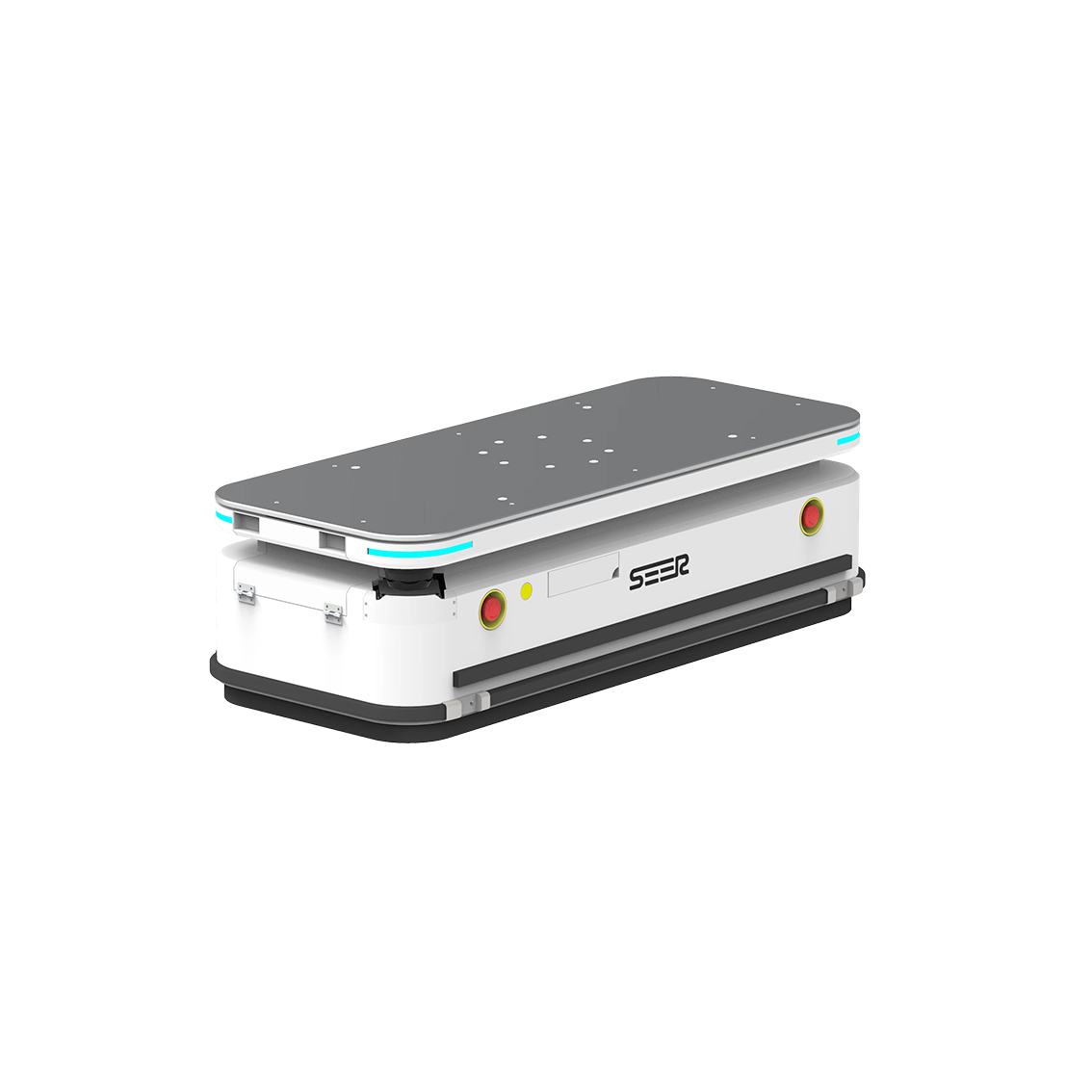
رباتهای بالابر – ربات بالابر همه جهته SJV-W600DS-DL
دسته اصلی
AGV AMR / بالابر جکی AGV AMR / وسیله نقلیه هدایت خودکار AGV / ربات سیار خودران AMR / ماشین AGV AMR برای جابجایی مواد صنعتی / ربات AGV سازنده چین / انبار AMR / ناوبری SLAM لیزری جکی AMR / ربات سیار AGV AMR / ناوبری SLAM لیزری شاسی AGV AMR / ربات لجستیک هوشمند
کاربرد

شاسی بدون سرنشین سری AMB AMB (پایه متحرک خودکار) برای خودروهای خودران کشاورزی، یک شاسی جهانی طراحی شده برای خودروهای خودران کشاورزی، ویژگیهایی مانند ویرایش نقشه و ناوبری محلیسازی را ارائه میدهد. این شاسی بدون سرنشین برای سبد کشاورزی، رابطهای گستردهای مانند I/O و CAN را برای نصب ماژولهای بالایی مختلف به همراه نرمافزار قدرتمند کلاینت و سیستمهای اعزام فراهم میکند تا به کاربران کمک کند تا به سرعت تولید و کاربرد خودروهای خودران کشاورزی را تکمیل کنند. چهار سوراخ نصب در بالای شاسی بدون سرنشین سری AMB برای خودروهای خودران کشاورزی وجود دارد که از انبساط دلخواه با جک، غلتک، دستگیره، کشش نهفته، نمایشگر و غیره برای دستیابی به کاربردهای متعدد یک شاسی پشتیبانی میکند. AMB به همراه SEER Enterprise Enhanced Digitalization میتواند اعزام و استقرار یکپارچه صدها محصول AMB را به طور همزمان محقق کند، که سطح هوشمند لجستیک و حمل و نقل داخلی را در کارخانه تا حد زیادی بهبود میبخشد.
ویژگی
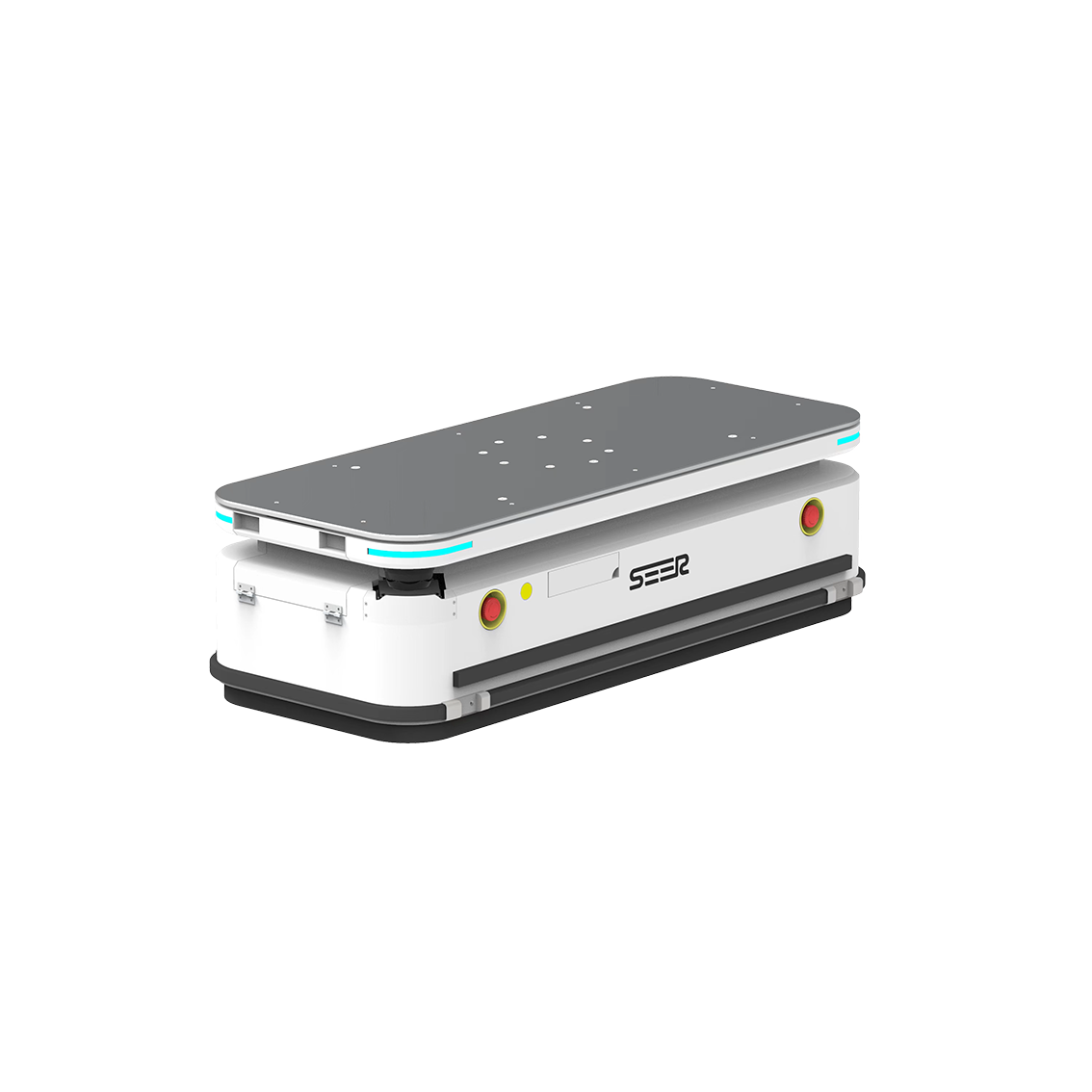
· بار مجاز: 600 کیلوگرم
· زمان اجرا: ۶.۵ ساعت
· شماره لیدار: 2
· قطر چرخش: ۱۳۲۲ میلیمتر
· سرعت ناوبری: ≤1.2 متر بر ثانیه
· دقت موقعیتیابی: ±۵، ±۰.۵ میلیمتر
● گزینههای ناوبری چندگانه موجود است
ناوبری SLAM لیزری و کد QR را میتوان آزادانه و به راحتی تغییر داد و الزامات سناریوهای متعدد و دقتهای مختلف را برآورده کرد.
● حرکت همهجهته انعطافپذیرتر
مدل حرکت همه جهته امکان حرکت نامحدود و محدودیت کمتر را در سناریوها فراهم میکند.
● حفاظت امنیتی
محافظت همه جانبه از طریق LIDAR + لبه ایمن.
● کارآمد و هوشمند
برای مدیریت و بهینهسازی عمیق کسبوکار، میتوان به سیستمهای برنامهریزی و انبارداری به صورت یکپارچه دسترسی داشت.
طراحی باریک ۵۴۶ میلیمتری برای راهروهای باریک مختلف.
● ظرفیت بار بالا و عمر باتری طولانی
ظرفیت بار بالا، تحمل وزن ۶۰۰ کیلوگرم و عمر باتری ۶.۵ ساعت را پشتیبانی میکند.



پارامتر مشخصات
| نام محصول | SJV-SW500 | SJV-W600DS-DL | SJV-W1000 | SJV-W1500 | |
| پایهپارامترها | روش ناوبری | لیزر اسلم | لیزر اسلم | لیزر اسلم | لیزر اسلم |
| حالت رانندگی | دیفرانسیل دو چرخ | فرمان دو جهته همه کاره | دیفرانسیل دو چرخ | دیفرانسیل دو چرخ | |
| رنگ پوسته | رنگ آبی / سفارشی | RAL9003 / رنگ سفارشی | رنگ آبی / سفارشی | رنگ آبی / سفارشی | |
| طول * عرض * ارتفاع (میلیمتر) | ۹۲۴*۷۵۸*۳۰۰ | ۱۲۷۶*۵۴۶*۳۶۵ | ۱۲۲۴*۷۳۰*۴۲۰ | ۱۲۱۰*۸۹۲*۲۸۰ | |
| قطر چرخش (میلیمتر) | ۱۰۳۵ عدد | ۱۳۳۰ | ۱۳۵۰ | ۱۴۱۵ | |
| وزن (با باتری)(کیلوگرم | ۲۰۰ | ۳۲۰ | ۲۵۰ | ۲۵۰ | |
| ظرفیت بار (کیلوگرم) | ۵۰۰ | ۶۰۰ | ۱۰۰۰ | ۱۵۰۰ | |
| ابعاد سکوی جک (میلیمتر) | ۶۰۰ پوند | ۱۲۵۰*۵۱۰ | 1200*700 | ۱۱۸۰*۸۶۰ | |
| حداکثر ارتفاع جک (میلیمتر) | ۶۰±۱ | ۶۰±۱ | ۶۰±۱ | ۶۰±۱ | |
| عملکرد پارامترها | حداقل عرض قابل عبور (میلی متر) | ۸۹۸ | ۶۶۰ | ۸۷۰ | ۱۰۰۰ |
| دقت موقعیت ناوبری (میلیمتر) * | ±۵ | ±۵ | ±۵ | ±۵ | |
| دقت زاویه ناوبری (°) * | ±۰.۵ | ±۰.۵ | ±۰.۵ | ±۱ | |
| سرعت پیمایش (متر بر ثانیه) | ۱.۶۷≤ | ≤1.2 | ۱.۶۷≤ | ۱.۶۷≤ | |
| باتریپارامترها | مشخصات باتری (ولت/آه) | ۴۸/۴۰ (فسفات آهن لیتیوم) | ۴۸/۴۰ (فسفات آهن لیتیوم) | ۴۸/۴۰ (فسفات آهن لیتیوم) | ۴۸/۴۰ (فسفات آهن لیتیوم) |
| عمر باتری جامع (ساعت) | 10 | 8 | 6 | 6 | |
| پارامترهای شارژ خودکار (V/A) | ۵۴.۶/۲۵ | ۵۴.۶/۲۵ | ۵۴.۶/۲۵ | ۵۴.۶/۲۵ | |
| زمان شارژ (10-80٪)(ساعت | ≤1.5 | ≤1.5 | ≤1.5 | ≤۲ | |
| روش شارژ | دستی/اتوماتیک | دستی/اتوماتیک/سوئیچ | دستی/اتوماتیک | دستی/اتوماتیک | |
| پیکربندیها | شماره لیدار | ۱ (SICK nanoScan3/P+F R2000-HD) | ۲ (SICK nanoScan3) | ۲ (SICK nanoScan3 / P+FR2000-HD + OLEILR-1BS2) | ۱(SICK nanoScan3 / P+F R2000-HD) |
| تعداد فوتوالکتریک اجتناب از موانع کم موقعیت | - | - | - | - | |
| تشخیص بار | - | - | - | - | |
| دکمه توقف الکترونیکی | ● | ● | ● | ● | |
| بلندگو | ● | ● | ● | ● | |
| نور اتمسفر | ● | ● | ● | ● | |
| ضربه گیر | ● | ● | ● | ● | |
| توابع | رومینگ وای فای | ● | ● | ● | ● |
| شارژ خودکار | ● | ● | ● | ● | |
| تشخیص قفسه | ● | ● | ● | ● | |
| چرخش | ● | - | - | ● | |
| مکان دقیق با کد QR | 〇 | 〇 | 〇 | 〇 | |
| ناوبری با کد QR | 〇 | 〇 | 〇 | 〇 | |
| ناوبری بازتابنده لیزری | 〇 | 〇 | 〇 | 〇 | |
| گواهینامهها | EMC/ESD | ● | ● | ● | - |
| سازمان ملل متحد 38.3 | ● | ● | ● | 〇 | |
* دقت ناوبری معمولاً به دقت تکرارپذیری اشاره دارد که یک ربات تا ایستگاه ناوبری میکند.
● استاندارد 〇 اختیاری هیچکدام
کسب و کار ما







