سری پنجههای برقی Hitbot – پنجه برقی مشارکتی Z-EFG-R



دسته اصلی
بازوی ربات صنعتی / بازوی ربات مشارکتی / گیره الکتریکی / محرک هوشمند / راهکارهای اتوماسیون
کاربرد
گیرههای ربات سری SCIC Z-EFG در اندازه کوچک با یک سیستم سروو داخلی هستند که امکان کنترل دقیق سرعت، موقعیت و نیروی گیره را فراهم میکند. سیستم گیره پیشرفته SCIC برای راهحلهای اتوماسیون، به شما امکان میدهد امکانات جدیدی را برای خودکارسازی وظایفی که هرگز فکر نمیکردید امکانپذیر باشد، باز کنید.

ویژگی

·یک گیره برقی سروو موتور کوچک اما قدرتمند.
·ترمینالها را میتوان برای برآورده کردن نیازهای مختلف پروژه جایگزین کرد.
·میتواند اشیاء شکننده و تغییر شکلپذیر مانند تخممرغ، لوله آزمایش، حلقه و غیره را بردارد.
·مناسب برای صحنههای بدون منبع هوا (مانند آزمایشگاهها و بیمارستانها).
سیستم سروو یکپارچه برای انواع درخواستها اعمال میشود
نیروی گیره بزرگ
نیروی گیره: 80 نیوتن
سکته مغزی: 20 میلی متر
کنترل دقت
تکرارپذیری: ±0.02 میلیمتر
وصل و اجرا کنید
طراحی ویژه برایگریپر برقی شش محوره
کنترلر داخلی است
پوشش ناحیه کوچک، مناسب برای ادغام.
دم قابل تغییر است
دم آن را میتوان تغییر داد تا برای درخواستهای مختلف اعمال شود.
بستن نرم
میتواند اشیاء شکننده را محکم نگه دارد

● انقلابی در جایگزینی گیرههای پنوماتیک با گیرههای برقی، اولین گیره برقی با سیستم سروو یکپارچه در چین.
● جایگزین عالی برای کمپرسور هوا + فیلتر + شیر برقی + شیر گاز + گریپر پنوماتیک
● عمر مفید چند چرخهای، مطابق با سیلندر سنتی ژاپنی




پارامتر مشخصات
Z-EFG-R یک پنجه رباتیک برقی با یک کنترلر داخلی و چندین عملکرد در یک دستگاه است. اندازه کوچک، اما عملکرد قدرتمندی دارد.
● یک گریپر برقی سروو موتور کوچک اما قدرتمند.
●ترمینالها را میتوان برای برآورده کردن نیازهای مختلف پروژه جایگزین کرد.
● میتواند اشیاء شکننده و تغییر شکلپذیر مانند تخممرغ، لوله آزمایش، حلقه و غیره را بردارد.
● مناسب برای صحنههای بدون منبع هوا (مانند آزمایشگاهها، و بیمارستانها).
Z-EFG-R یک گیره الکتریکی کوچک است که دارای سیستم سروو یکپارچه است و میتواند جایگزین پمپ + فیلتر + مقدار مغناطیسی الکترون + دریچه گاز + گیره هوا شود.
| شماره مدل Z-EFG-R | پارامترها |
| سکته مغزی کامل | 20 میلیمتر |
| نیروی چنگش | 80N |
| تکرارپذیری | ±0.02 میلیمتر |
| وزن توصیه شده برای گرفتن | ۰.۸ کیلوگرم |
| حالت انتقال | قفسه دنده + راهنمای غلتک متقاطع |
| پر کردن گریس اجزای متحرک | هر شش ماه یا ۱ میلیون حرکت / زمان |
| زمان حرکت ضربه یک طرفه | ۰.۴۵ ثانیه |
| محدوده دمای عملیاتی | 5-55℃ |
| محدوده رطوبت عملیاتی | RH35-80 (بدون یخ زدگی) |
| حالت حرکت | دو انگشت به صورت افقی حرکت میکنند |
| کنترل سکته مغزی | قابل تنظیم |
| تنظیم نیروی گیره | قابل تنظیم |
| وزن | 0.5 کیلوگرم |
| ابعاد (طول * عرض * ارتفاع) | ۶۸ * ۶۸ * ۱۳۲.۷ میلیمتر |
| قرار دادن کنترلر | داخلی |
| قدرت | 5W |
| نوع موتور | دی سی بدون جاروبک |
| ولتاژ نامی | ۲۴ ولت |
| جریان اوج | 1A |
| بازوی ربات شش محوره قابل تنظیم | یو آر، اوبو |
رانندگی و کنترل کننده داخلی هستند
Z-EFG-R یک گیره الکتریکی کوچک است که دارای سیستم سروو یکپارچه است و میتواند جایگزین پمپ هوا + فیلتر + شیر مغناطیسی الکترونی + شیر گاز + گیره هوا شود.


سازگار با بازوی ربات شش محوره
این گریپر میتواند با بازوی ربات شش محوره رایج سازگار باشد، برای استفاده آسان، دارای طول کورس 20 میلیمتر، نیروی گیره 80 نیوتن و کورس و نیروی گیره قابل تنظیم است.
شکل کوچک، نصب انعطافپذیر
ابعاد Z-EFG-R برابر با طول 68 * عرض 68 * ارتفاع 132.7 میلیمتر است، ساختار آن جمع و جور است، از روشهای نصب چندگانه پشتیبانی میکند، کنترلر داخلی دارد، فضای کمی را اشغال میکند، استفاده از آن برای انواع درخواستهای مربوط به بستن آسان است.

واکنش سریع، کنترل دقیق
کوتاهترین زمان حرکت تک ضربهای 0.45 ثانیه است، تکرارپذیری آن ±0.02 میلیمتر است، قسمت انتهایی آن به راحتی قابل تغییر است، مشتریان میتوانند جسم را طبق درخواست گیره کنند.
نمودار نصب ابعاد
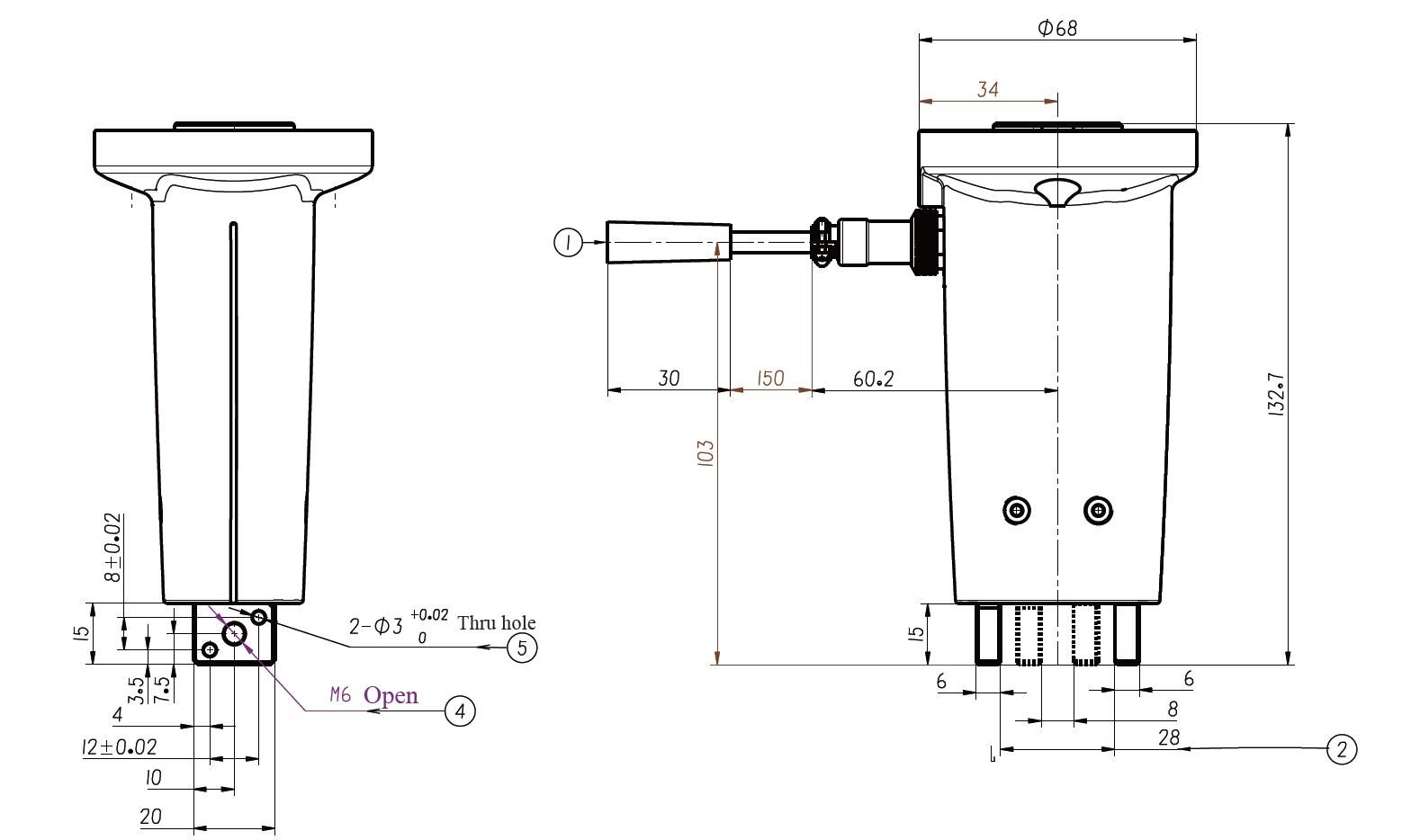
① RKMV8-354 دوشاخه هوانوردی پنج هستهای به RKMV8-354
② سکته مغزی گیره الکتریکی 20 میلی متر است
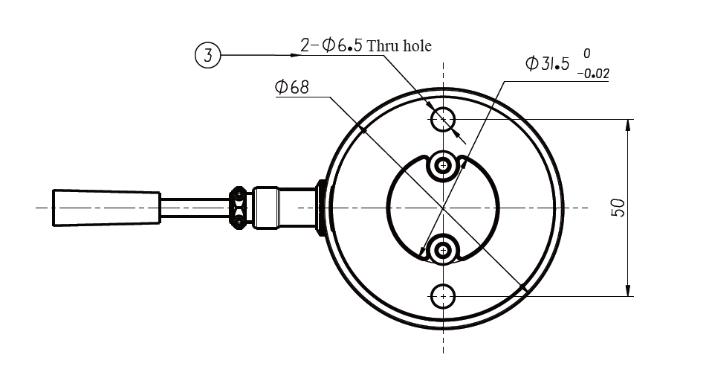
③ موقعیت نصب، از دو پیچ M6 برای اتصال به فلنج انتهای بازوی ربات UR استفاده کنید.
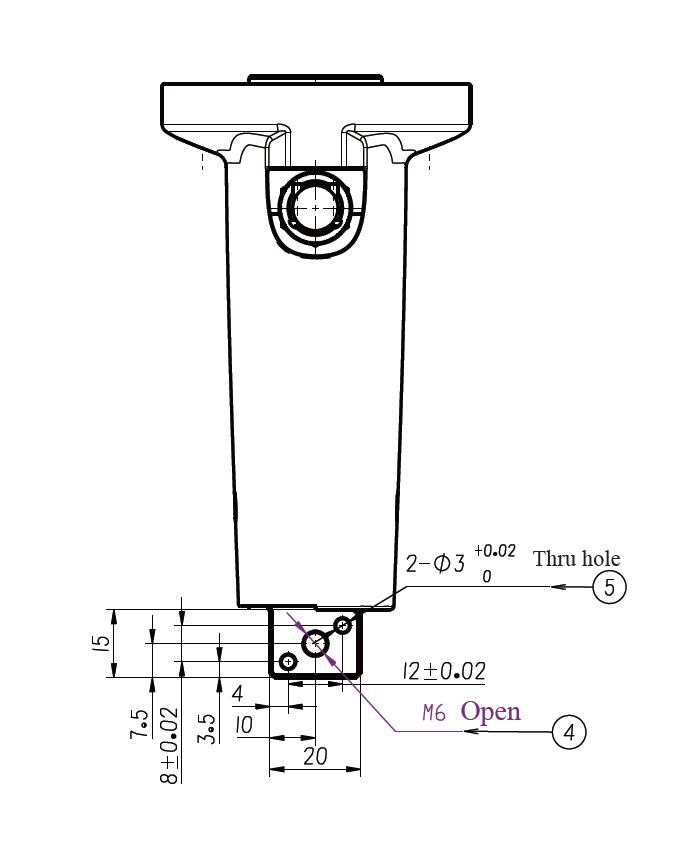
④ موقعیت نصب، موقعیت نصب فیکسچر (پیچ M6)
⑤ موقعیت نصب، موقعیت نصب فیکسچر (۳ سوراخ پین استوانهای)
پارامترهای الکتریکی
ولتاژ نامی 24±2 ولت
جریان ۰.۴ آمپر

کسب و کار ما







