نسل جدید سری رباتهای هوش مصنوعی کوبوت - ربات هوش مصنوعی کوبوت TM12S شش محوره

دسته اصلی
بازوی ربات صنعتی / بازوی ربات مشارکتی / گیره الکتریکی / محرک هوشمند / راهکارهای اتوماسیون
کاربرد
TM12S یک ربات کمکی معمولی از سری TM AI Cobot S است که راندمان تولید شما را افزایش داده و زمان چرخه خط تولید شما را کاهش میدهد. این ربات کاربردهای گستردهای در کارهای مختلفی مانند جمعآوری سهبعدی سطل زباله، مونتاژ، برچسبگذاری، برداشتن و گذاشتن، جابجایی PCB، پرداخت و پلیسهگیری، بازرسی کیفیت، پیچگوشتی و موارد دیگر دارد.
ویژگیها
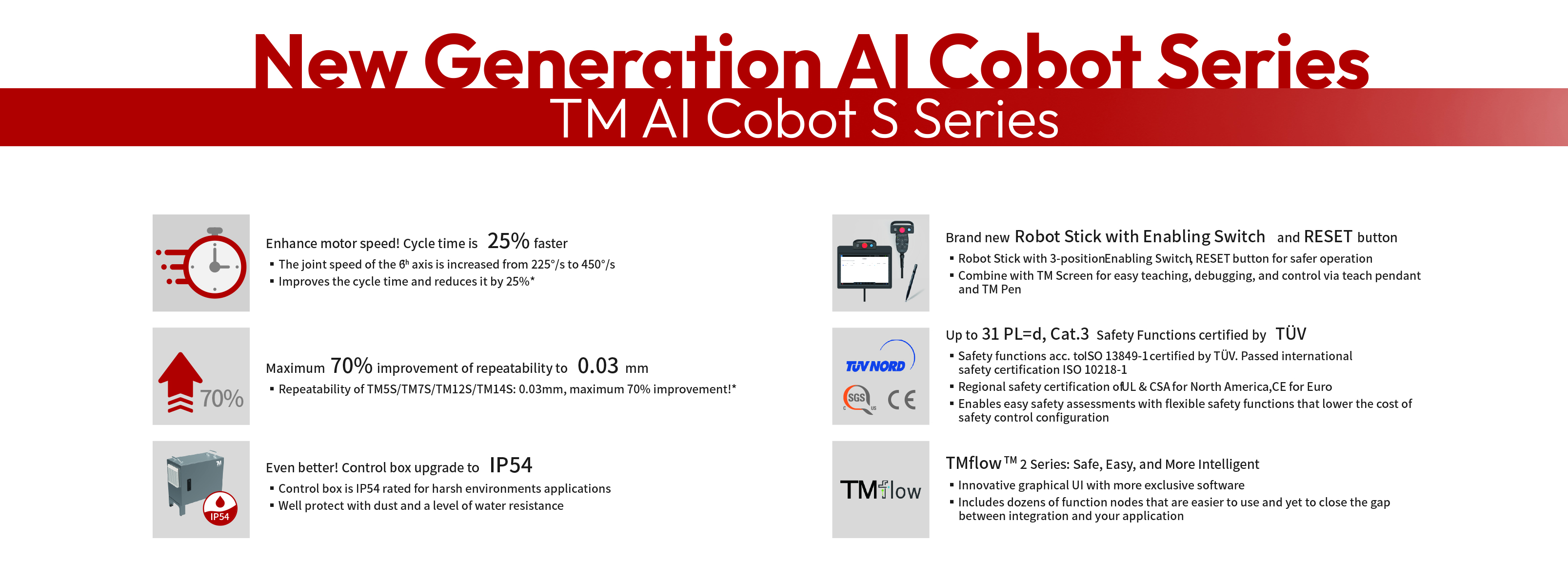
هوشمند
با هوش مصنوعی، آیندهی Cobot خود را تضمین کنید
• بازرسی نوری خودکار (AOI)
• تضمین کیفیت و ثبات
• افزایش راندمان تولید
• کاهش هزینههای عملیاتی
ساده
بدون نیاز به تجربه
• رابط گرافیکی برای برنامه نویسی آسان
• گردش کار ویرایش فرآیندگرا
• راهنمای دستی ساده برای آموزش موقعیتها
• کالیبراسیون سریع بصری با برد کالیبراسیون
ایمن
ایمنی مشارکتی اولویت ماست
• مطابق با استانداردهای ISO 10218-1:2011 و ISO/TS 15066:2016
• تشخیص برخورد با توقف اضطراری
• در هزینه و فضای مورد نیاز برای موانع و حصارکشی صرفهجویی کنید
• تنظیم محدودیت سرعت در یک فضای کاری مشترک
رباتهای همکار مجهز به هوش مصنوعی، حضور و جهتگیری محیط و قطعات خود را تشخیص میدهند تا بازرسیهای بصری و وظایف پویای برداشتن و گذاشتن را انجام دهند. هوش مصنوعی را به راحتی در خط تولید اعمال کنید و بهرهوری را افزایش دهید، هزینهها را کاهش دهید و زمان چرخه را کوتاه کنید. بینایی هوش مصنوعی همچنین میتواند نتایج ماشینها یا تجهیزات آزمایش را بخواند و بر اساس آن تصمیمات مناسبی بگیرد.
علاوه بر بهبود فرآیندهای اتوماسیون، یک ربات همکار مبتنی بر هوش مصنوعی میتواند دادهها را در طول تولید ردیابی، تجزیه و تحلیل و ادغام کند تا از نقصها جلوگیری کرده و کیفیت محصول را بهبود بخشد. به راحتی اتوماسیون کارخانه خود را با مجموعهای کامل از فناوری هوش مصنوعی ارتقا دهید.
رباتهای همکار ما مجهز به یک سیستم بینایی یکپارچه هستند که به رباتهای همکار این امکان را میدهد تا محیط اطراف خود را درک کنند که این امر به طور قابل توجهی قابلیتهای رباتهای همکار را افزایش میدهد. بینایی ربات یا توانایی «دیدن» و تفسیر دادههای بصری به دستورات سریع، یکی از ویژگیهایی است که ما را برتر میکند. این یک عامل تغییر دهنده بازی برای انجام دقیق وظایف در فضاهای کاری پویا و در حال تغییر است که باعث میشود عملیات به طور روانتری انجام شوند و فرآیندهای اتوماسیون کارآمدتر شوند.
با در نظر گرفتن کاربران تازهکار، دانش برنامهنویسی پیشنیاز شروع کار با AI Cobot نیست. حرکت کلیک و کشیدن بصری با استفاده از نرمافزار برنامهنویسی جریان ما، پیچیدگی را کاهش میدهد. فناوری ثبت اختراع شده ما به اپراتورهایی که هیچ تجربه کدنویسی ندارند، اجازه میدهد تا پروژهای را در مدت زمان پنج دقیقه برنامهنویسی کنند.
حسگرهای ایمنی ذاتی، ربات هوش مصنوعی را هنگام تشخیص تماس فیزیکی متوقف میکنند و آسیبهای احتمالی را برای ایجاد محیطی بدون فشار و ایمن به حداقل میرسانند. همچنین میتوانید محدودیتهای سرعت را برای ربات تنظیم کنید تا بتواند در محیطهای مختلف درست در کنار کارگران شما استفاده شود.
محصولات مرتبط



پارامتر مشخصات
| مدل | TM12S | |
| وزن | ۳۳.۳ کیلوگرم | |
| حداکثر بار مفید | ۱۲ کیلوگرم | |
| رسیدن | ۱۳۰۰ میلیمتر | |
| محدودههای مشترک | جی۱،J2، J4، J5J6 | ±۳۶۰ درجه |
| J3 | ±۱۶۲ درجه | |
| سرعت | جی۱، جی۲ | ۱۳۰ درجه بر ثانیه |
| J3 | ۲۱۰ درجه بر ثانیه | |
| J4 | ۲۲۵ درجه بر ثانیه | |
| J5 | ۲۲۵ درجه بر ثانیه | |
| J6 | ۴۵۰ درجه بر ثانیه | |
| حداکثر سرعت | ۴ متر بر ثانیه | |
| تکرارپذیری | ± 0.03 میلیمتر | |
| درجه آزادی | ۶ مفصل چرخشی | |
| ورودی/خروجی | جعبه کنترل | ورودی دیجیتال: 16 /خروجی دیجیتال: 16 ورودی آنالوگ: 2 /خروجی آنالوگ: ۲ |
| اتصال ابزار | ورودی دیجیتال: 3 /خروجی دیجیتال: 3 DO_0 (DO-0/AI) / DO_1(DO-1/RS485+)/Do_2 (DO-2/RS485-) | |
| منبع تغذیه ورودی/خروجی | ۲۴ ولت ۲.۰ آمپر برای جعبه کنترل و ۲۴ ولت ۱.۵ آمپر برای ابزار | |
| طبقه بندی IP | IP54 (بازوی ربات)؛ IP54 (جعبه کنترل) | |
| مصرف برق | ۴۰۰ وات معمولی | |
| دما | این ربات میتواند در محدوده دمایی 0 تا 50 درجه سانتیگراد کار کند. | |
| پاکیزگی | کلاس ایزو ۳ | |
| منبع تغذیه | ۱۰۰-۲۴۰ ولت متناوب، ۵۰-۶۰ هرتز | |
| رابط ورودی/خروجی | دو پورت COM، یک پورت HDMI، سه پورت LAN، دو پورت USB2.0، چهار پورت USB3.0 | |
| ارتباطات | RS232، Ethemet، Modbus TCP/RTU (ارباب و برده)، PROFINET (اختیاری)، EtherNet/IP (اختیاری) | |
| محیط برنامهنویسی | TMflow، مبتنی بر فلوچارت، مبتنی بر اسکریپت | |
| صدور گواهینامه | CE، نیمه S2 (اختیاری) | |
| هوش مصنوعی و بینایی ربات | ||
| عملکرد هوش مصنوعی | طبقهبندی، تشخیص شیء، قطعهبندی، تشخیص ناهنجاری، OCR هوش مصنوعی | |
| کاربرد | موقعیتیابی، خواندن بارکد ۱D/2D، OCR، تشخیص نقص، اندازهگیری، بررسی مونتاژ | |
| دقت موقعیتیابی | موقعیتیابی دوبعدی: 0.1 میلیمتر*(1) | |
| چشم در دست (داخلی) | کارمرای رنگی با فوکوس خودکار و وضوح ۵ میلیون نقطه، فاصله کاری ۱۰۰ میلیمتر ~ ∞ | |
| چشم به دست (اختیاری) | پشتیبانی از حداکثر ۲ دوربین دوبعدی GigE یا ۱ دوربین دوبعدی GigE + ۱ دوربین سهبعدی*(2) | |
| *(1)دادههای این جدول توسط آزمایشگاه TM اندازهگیری شدهاند و فاصله کاری ۱۰۰ میلیمتر است. لازم به ذکر است که در کاربردهای عملی، مقادیر مربوطه ممکن است به دلیل عواملی مانند منبع نور محیطی در محل، ویژگیهای جسم و روشهای برنامهریزی بینایی که بر تغییر دقت تأثیر میگذارند، متفاوت باشند. *(2)برای اطلاع از مدلهای دوربین سازگار با TM Robot به وبسایت رسمی TM Plug & Play مراجعه کنید. | ||
کسب و کار ما


دسته بندی محصولات
-

سری TM AI COBOT – TM16M 6 محوره هوش مصنوعی کوبوت
-

نسل جدید سری رباتهای هوش مصنوعی کوبوت - TM25S 6 ...
-

بازوهای رباتیک مشارکتی – بازوی رباتیک ۶ محوره CR3 ...
-

سری TM AI COBOT – TM5M-900 6 محوره هوش مصنوعی کوبوت
-
سری TM AI COBOT – TM16 6 محوره هوش مصنوعی کوبوت
-

سری TM AI COBOT – TM12M 6 محوره هوش مصنوعی کوبوت