سری پنجههای برقی Hitbot – پنجه برقی سه انگشتی Z-ECG-10




دسته اصلی
بازوی ربات صنعتی / بازوی ربات مشارکتی / گیره الکتریکی / محرک هوشمند / راهکارهای اتوماسیون
کاربرد

ویژگی

·تشخیص افت گیره، تابع خروجی مساحت
·نیرو، موقعیت، سرعت قابل کنترل، کنترل دقیق از طریق Modbus
·گیره مرکزی سه انگشتی
·کنترلر داخلی: فضای کم، ادغام آسان
·حالت کنترل: ۴۸۵ (مودباس RTU)، ورودی/خروجی
گیره برقی سه انگشتی برای بستن آسان اجسام استوانهای
عملکرد بالا
نیروی بستن: 3-10 نیوتن
چگالی انرژی بالا
دقت در کنترل
قابل کنترل توسط Modbus
هوشمند برای بازخورد
این دستگاه دارای عملکرد تشخیص افت فشار در حالت بسته و خروجی منطقهای است.
کنترلر داخلی
پوشش فضای کوچک، ادغام آسان.
حالتهای کنترل چندگانه
پشتیبانی از ورودی/خروجی ۴۸۵ (مودباس)
گیره سه انگشتی
گیره سه انگشتی، مناسب برای مناسبتهای مختلف




پارامتر مشخصات
| شماره مدل Z-ECG-10 | پارامترها |
| مجموع سکته | ۱۰ میلیمتر |
| نیروی چنگش | ۳-۱۰ نیوتن |
| تکرارپذیری | ±0.03 میلیمتر |
| وزن توصیه شده برای گرفتن | حداکثر 0.2 کیلوگرم |
| انتقال حالت | چرخ دنده و پینیون + ریل راهنمای ساچمه |
| پر کردن گریس اجزای متحرک | هر شش ماه یا ۱ میلیون حرکت / زمان |
| زمان حرکت ضربه یک طرفه | ۰.۳ ثانیه |
| محدوده دمای عملیاتی | 5-55℃ |
| محدوده رطوبت عملیاتی | RH35-80(بدون یخ زدگی) |
| بلکش | یک طرفه: 0.2 میلی متر |
| کنترل سکته مغزی | قابل تنظیم |
| تنظیم نیروی گیره | قابل تنظیم |
| وزن | 0.5 کیلوگرم |
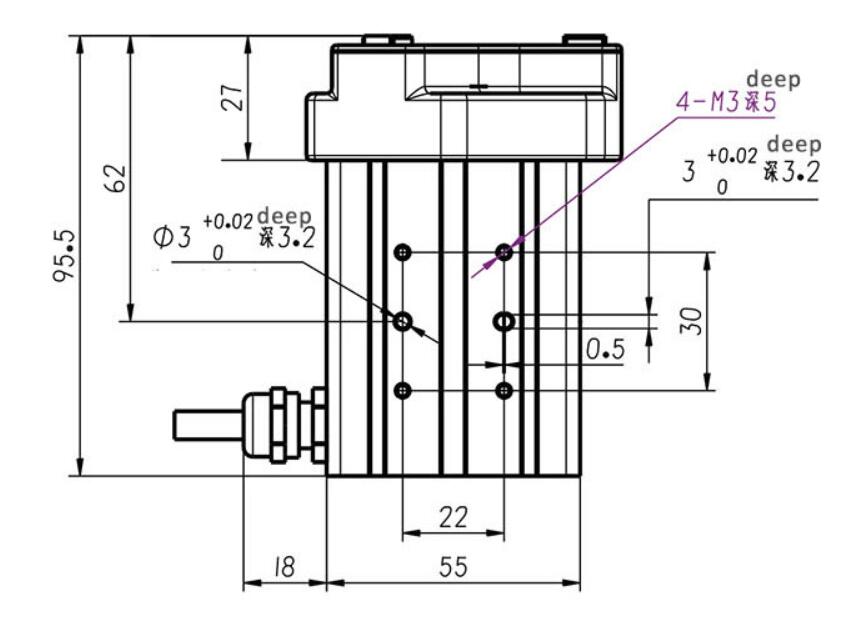
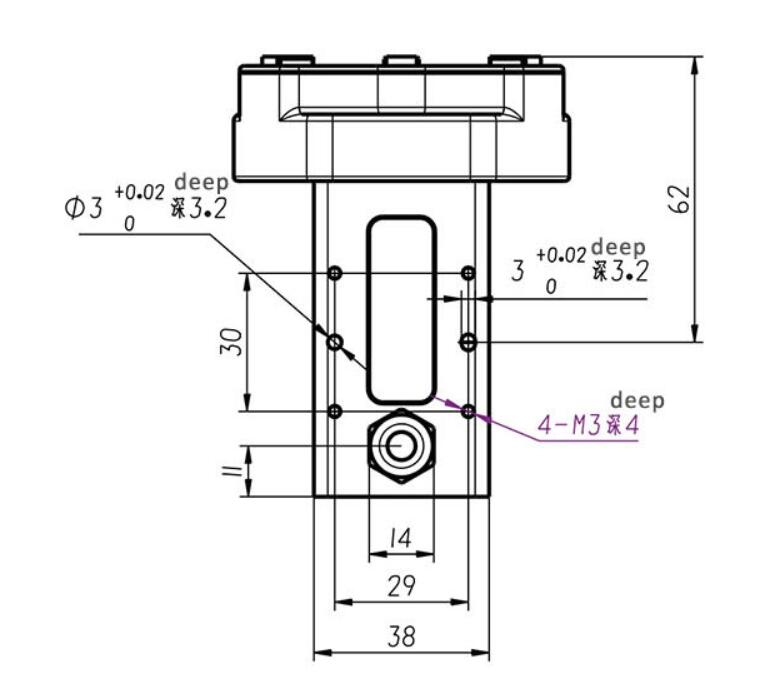
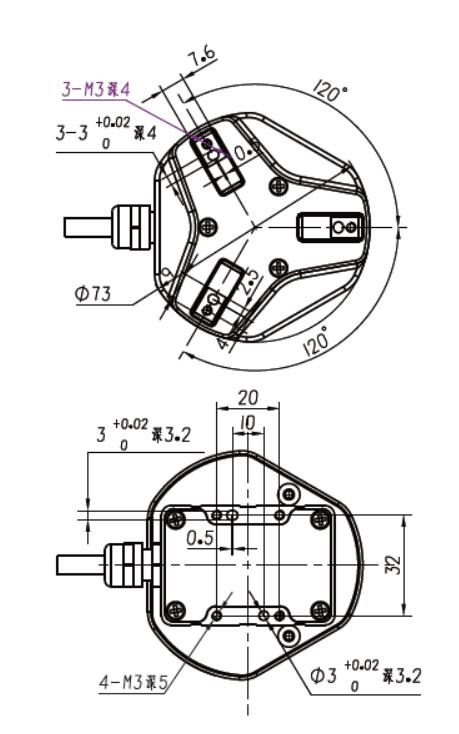
| ابعاد(ل * چ * ح) | ۷۳ * ۷۳ * ۹۵.۵ میلیمتر |
| درجه حفاظت | آی پی ۲۰ |
| نوع موتور | سروو موتور الکتریکی |
| جریان پیک | 0.6 آمپر |
| ولتاژ نامی | ۲۴ ولت ±۱۰٪ |
| جریان آماده به کار | 0.3 آمپر |
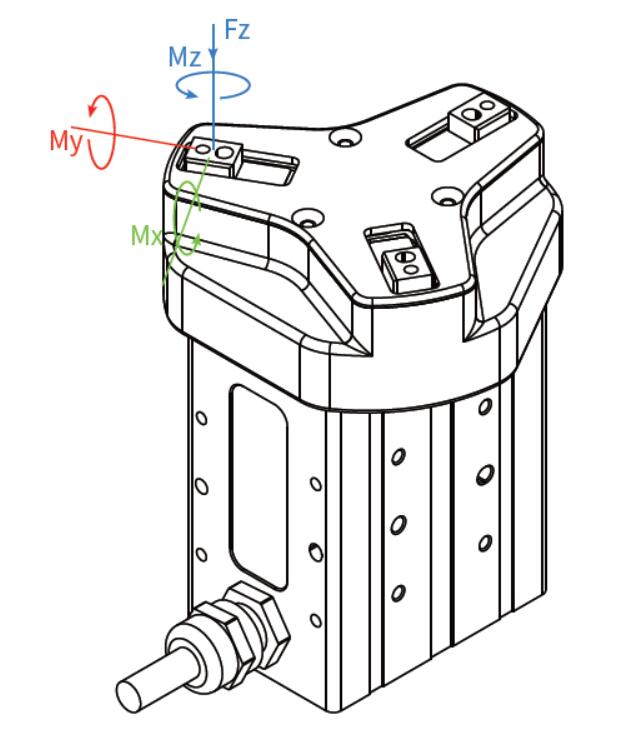
| بار استاتیک مجاز در جهت عمودی | |
| فز: | 70N |
| گشتاور مجاز | |
| مکس: | 0.64 نیوتن متر |
| من: | 0.4 نیوتن متر |
| مز: | 0.48 نیوتن متر |
دقت در موقعیتیابی، گیره سه انگشتی
گیره برقی سه انگشتی Z-ECG-10، تکرارپذیری آن ±0.03 میلیمتر است، گیره آن سه انگشتی است و دارای عملکرد تشخیص افت گیره و خروجی منطقهای است که میتواند برای گیره کردن اجسام استوانهای بهتر عمل کند.


کنترلر داخلی، یکپارچگی بالا
محافظت عالی در برابر اضافه بار ناگهانی، برای اطمینان از اینکه سیستم گریپر برقی متوقف نمیشود یا وضعیت غیرعادی دیگری ندارد. این گریپر دارای کنترلر داخلی است، نیرو، بیت و سرعت را میتوان کنترل کرد، فضای کاری کوچکی را پوشش میدهد و به راحتی قابل ادغام است.
شکل کوچک، نصب انعطافپذیر

Z-ECG-10 از نوع انتقال قدرت رک اند پینیون + ریل خطی بهره میبرد، اندازه آن L73*W73*H109 و وزن آن فقط 0.65 کیلوگرم است، ساختار آن جمع و جور است، از انواع نصب چندگانه پشتیبانی میکند و انجام بسیاری از کارهای گیرهبندی را آسان میکند.


واکنش سریع، کنترل دقیق نیرو
کوتاهترین زمان بستن این گیره 0.3 ثانیه، نیروی گیره 3-10 نیوتن، ضربه گیره 10 میلیمتر و وزن آن حدود 0.2 کیلوگرم است که میتواند دقت بالایی را در بستن گیره ایجاد کند.
حالتهای کنترل چندگانه، کارکرد آسان

Z-ECG-10 میتواند توسط Modbus با دقت کنترل شود، تخصیص آن آسان است، برای استفاده از ارتباط ورودی/خروجی دیجیتال، فقط به یک کابل برای اتصال روشن/خاموش نیاز دارید، همچنین با سیستم کنترل اصلی PLC سازگار است.

مرکز ثقل بار افست
کسب و کار ما







