بازوهای رباتیک SCARA – بازوی رباتیک مشارکتی Z-Arm-4160B





دسته اصلی
بازوی ربات صنعتی / بازوی ربات مشارکتی / گیره الکتریکی / محرک هوشمند / راهکارهای اتوماسیون
کاربرد
رباتهای همکار SCIC Z-Arm، رباتهای مشارکتی سبک وزن ۴ محوره با موتور محرک داخلی هستند و دیگر نیازی به کاهندههایی مانند سایر رباتهای اسکارا سنتی ندارند و هزینه را تا ۴۰٪ کاهش میدهند. رباتهای همکار SCIC Z-Arm میتوانند عملکردهایی از جمله چاپ سهبعدی، جابجایی مواد، جوشکاری و حکاکی لیزری را انجام دهند. این رباتها قادرند کارایی و انعطافپذیری کار و تولید شما را تا حد زیادی بهبود بخشند.
ویژگیها

دقت بالا
تکرارپذیری
±0.02 میلیمتر
محور Z سفارشی
0.1-0.8 متر
ظرفیت ترابری بزرگ
پایه ۴ کیلوگرمی
حداکثر ۵ کیلوگرم
سرعت بالاتر
حداکثر سرعت خطی ۲ متر بر ثانیه
(وزن پایه ۵ کیلوگرم)
بازوی رباتیک ۴ محوره با طول بازوی بزرگ، دقت بالا و کاربری آسان
دقت بالا
تکرارپذیری: ±0.02 میلیمتر
دهانه بزرگ بازو
محور J1: 325 میلیمترمحور J2: 275 میلیمتر
محور Z سفارشی
سکته مغزی بالا و پایین را می توان بین 0.1 تا 0.8 متر سفارشی کرد
صرفهجویی در فضا
درایو/کنترلر داخلی است
ساده و آسان برای استفاده
تازه واردی که بازوی رباتیک را نمیشناخت، میتواند به راحتی از آن استفاده کند، رابط کاربری در حال باز شدن است.
سرعت بالا
سرعت آن 2000 میلیمتر بر ثانیه تحت بار 4 کیلوگرم است

محصولات مرتبط



پارامتر مشخصات
ربات SCIC Hitbot Z-Arm 4160B توسط SCIC Tech طراحی شده است، این ربات مشارکتی سبک وزن، برنامه نویسی و استفاده آسان، پشتیبانی از SDK است. علاوه بر این، از تشخیص برخورد پشتیبانی میکند، یعنی هنگام تماس با انسان به طور خودکار متوقف میشود، که همکاری هوشمند انسان و ماشین است و امنیت بالایی دارد.
| بازوی رباتیک مشارکتی Z-Arm 4160B | پارامترها |
| طول بازوی ۱ محوره | ۳۲۵ میلیمتر |
| زاویه چرخش ۱ محور | ±۹۰ درجه |
| طول بازوی ۲ محوره | ۲۷۵ میلیمتر |
| زاویه چرخش ۲ محوره | ±۱۶۴ درجه (اختیاری): ۱۵-۳۴۵ درجه |
| سکته مغزی محور Z | ارتفاع ۴۱۰ قابل تنظیم است |
| محدوده چرخش محور R | ±۱۰۸۰ درجه |
| سرعت خطی | ۲۰۰۰ میلیمتر بر ثانیه (بار مفید ۴ کیلوگرم) |
| تکرارپذیری | ±0.02 میلیمتر |
| بار استاندارد | ۴ کیلوگرم |
| حداکثر بار مفید | ۵ کیلوگرم |
| درجه آزادی | 4 |
| منبع تغذیه | ۲۲۰ ولت/۱۱۰ ولت ۵۰-۶۰ هرتز، قابل تطبیق با حداکثر توان ۴۸ ولت DC، ۹۶۰ وات |
| ارتباطات | اترنت |
| قابلیت توسعه | کنترلر حرکتی یکپارچه داخلی، ۲۴ ورودی/خروجی + انبساط زیر بازو را فراهم میکند |
| محور Z را میتوان از نظر ارتفاع سفارشی کرد | 0.1 متر ~ 0.8 متر |
| آموزش کشیدن محور Z | / |
| رابط برق محفوظ است | پیکربندی استاندارد: سیمهای 24*23awg (بدون محافظ) از پنل سوکت از طریق پوشش بازوی پایینی اختیاری: ۲ لوله خلاء φ۴ از طریق پنل سوکت و فلنج |
| گریپرهای برقی سازگار با HITBOT | Z-EFG-8S/Z-EFG-12/Z-EFG-20/Z-EFG-20S/Z-EFG-20F/Z-ERG-20C/Z-EFG-30/Z-EFG-50/Z-EFG-100 |
| نور تنفسی | / |
| دامنه حرکتی بازوی دوم | استاندارد: ±164° اختیاری: 15-345deg |
| لوازم جانبی اختیاری | / |
| از محیط استفاده کنید | دمای محیط: 0-45 درجه سانتیگراد رطوبت: 20-80٪ RH (بدون یخ زدگی) |
| ورودی دیجیتال پورت ورودی/خروجی (ایزوله) | ۹+۳+بازو ساعد (اختیاری) |
| خروجی دیجیتال پورت ورودی/خروجی (ایزوله) | ۹+۳+بازو ساعد (اختیاری) |
| ورودی آنالوگ پورت ورودی/خروجی (4-20 میلیآمپر) | / |
| خروجی آنالوگ پورت ورودی/خروجی (4-20 میلیآمپر) | / |
| ارتفاع بازوی ربات | ۸۶۰ میلیمتر |
| وزن بازوی ربات | وزن خالص کورس ۴۱۰ میلیمتر، ۳۶.۵ کیلوگرم |
| اندازه پایه | 250 میلیمتر * 250 میلیمتر * 15 میلیمتر |
| فاصله بین سوراخهای نصب پایه | ۲۰۰ میلیمتر * ۲۰۰ میلیمتر با چهار پیچ M8 * ۲۰ |
| تشخیص برخورد | √ |
| آموزش کشیدن | √ |
انتخابی ایدهآل برای کارهای مونتاژ سبک
Z-Arm XX60B یک بازوی رباتیک ۴ محوره با دهانه بازوی بزرگ است که فضای کمی را اشغال میکند، برای قرار دادن در ایستگاه کاری یا داخل دستگاه بسیار مناسب است و انتخابی ایدهآل برای کارهای مونتاژ سبک وزن میباشد.


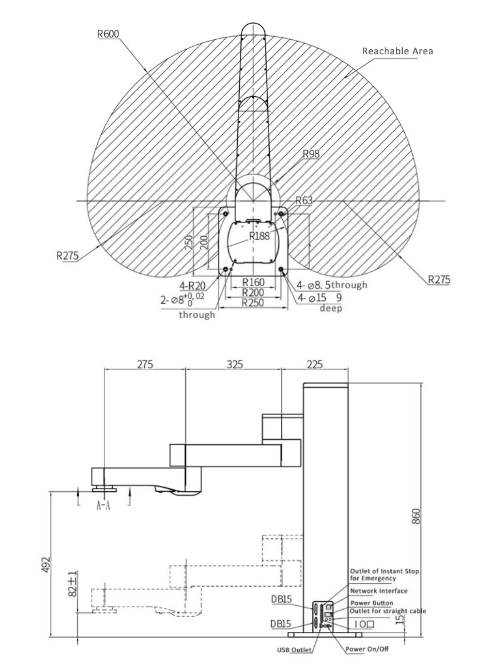
سبک با زاویه چرخش بزرگ

وزن محصول حدود ۳۶.۵ کیلوگرم است، حداکثر بار آن میتواند تا ۵ کیلوگرم باشد، زاویه چرخش محور اول ۹۰ درجه، زاویه چرخش محور دوم ۱۶۴ درجه و محدوده چرخش محور راست میتواند تا ۱۰۸۰ درجه باشد.
دهانه بزرگ بازو، کاربرد گسترده

Z-Arm XX60B دارای طول بازوی بلندی است، طول محور اول ۳۲۵ میلیمتر و طول محور دوم ۲۷۵ میلیمتر است و سرعت خطی آن میتواند تا ۲۰۰۰ میلیمتر بر ثانیه تحت بار ۴ کیلوگرم باشد.


انعطافپذیر در استقرار، سریع در تغییر
Z-Arm XX60B دارای ویژگیهای سبکی، صرفهجویی در فضا و انعطافپذیری در استقرار است، برای استقرار در بسیاری از کاربردها مناسب است و طرح تولید قبلی را تغییر نمیدهد، از جمله تغییر سریع توالی فرآیند و تکمیل دسته کوچک تولید و غیره.
DragTeaching to Complete Program

این نرمافزار بر اساس طراحی گرافیکی ساخته شده است، ماژولهای نقطهای، سیگنال خروجی، گیره الکتریکی، سینی، تأخیر، زیرفرآیند، تنظیم مجدد و سایر عملکردهای اساسی را ارائه میدهد، کاربران میتوانند ماژول را برای کنترل بازوی ربات در قسمت برنامهنویسی بکشند، رابط کاربری ساده است، اما عملکرد قدرتمندی دارد.
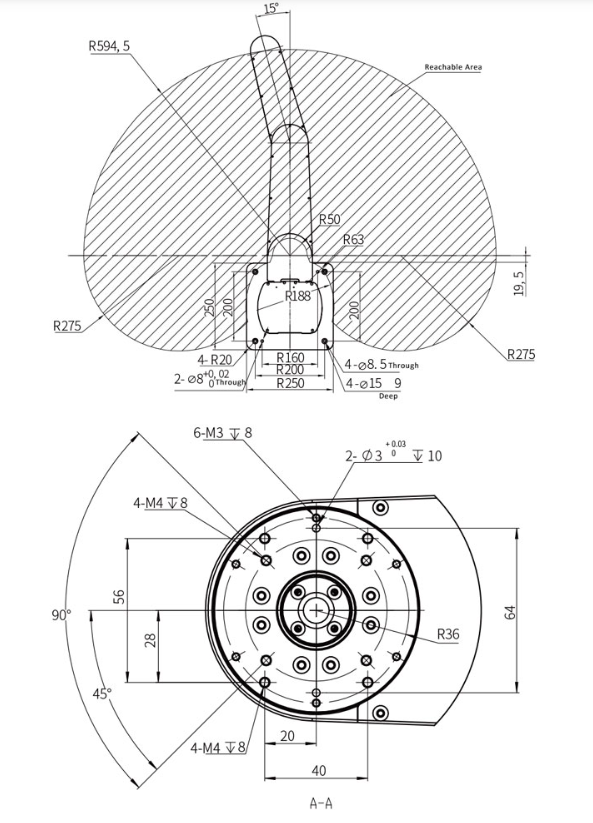
محدوده حرکت نسخه M1 (چرخش به بیرون)
توصیه کانکتور DB15

مدل پیشنهادی: نری با روکش طلا و پوسته ABS مدل YL-SCD-15M مادگی با روکش طلا و پوسته ABS مدل YL-SCD-15F
توضیحات اندازه: 55mm * 43mm * 16mm
(به شکل ۵ مراجعه کنید)
نمودار محیط استفاده خارجی بازوی ربات

کسب و کار ما






